4,809 Views
4,809 Viewsหลักการทำงานของหุ่นยนต์อุตสาหกรรม
การทำงานของหุ่นยนต์อุตสาหกรรมประกอบด้วย ๒ ส่วนใหญ่ๆ ได้แก่ ระบบทางกลของหุ่นยนต์ และระบบควบคุมหุ่นยนต์ ระบบทางกล หมายถึง ส่วนที่เป็นโครงสร้าง และส่วนที่ให้กำลังขับเคลื่อนหุ่นยนต์ ส่วน ระบบควบคุม ประกอบด้วย ระบบบังคับการทำงานหุ่นยนต์ ระบบป้อนข้อมูลกลับ ตลอดจนการสอนหุ่นยนต์ให้ทำงานตามชุดคำสั่ง

ระบบทางกลของหุ่นยนต์อุตสาหกรรม
ระบบทางกลของหุ่นยนต์อุตสาหกรรมที่สำคัญมี ๓ ประการ คือ ลักษณะโครงสร้างของหุ่นยนต์ อุปกรณ์ให้กำลังขับเคลื่อนหุ่นยนต์ และมือหุ่นยนต์

ลักษณะโครงสร้างของหุ่นยนต์
เนื่องจากหุ่นยนต์อุตสาหกรรมได้รับการออกแบบสร้างขึ้นมา เพื่อทำหน้าที่แทนคน ดังนั้น ลักษณะการออกแบบจึงมักจะเป็นส่วนบนของลำตัวมนุษย์ ประกอบด้วยหัวไหล่ แขน และมือ โดยปกติแล้ว มักออกแบบเป็นแขนเดียว ในบางแบบได้ออกแบบให้แขนเคลื่อนที่อยู่บนทางเลื่อนได้ อาจจำแนกโครงสร้างของหุ่นยนต์ได้ ๔ แบบ คือ
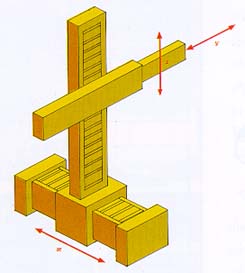
ก. โครงสร้างคาร์ทีเซียน หรือฉาก (cartesian or rectangular) เป็นโครงสร้างที่ประกอบด้วยส่วนต่างๆ ที่วางไว้ตั้งฉากซึ่งกันและกัน ๓ ส่วน ซึ่งทำให้สามารถเคลื่อนที่ไปยังจุดที่ต้องการได้
โครงสร้างคาร์ทีเซียนหรือโครงสร้างฉาก การเคลื่อนที่ของแกนการทำงานทั้งสามแกน จะตั้งฉากกัน ให้เห็นถึงหุ่นยนต์ระบบลมในงานเจาะ
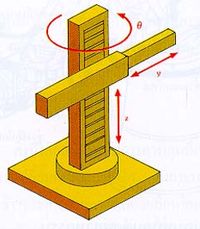
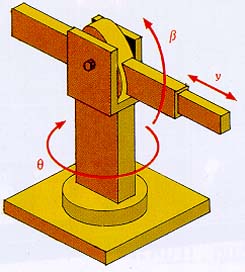
ข. โครงสร้างทรงกระบอก (cylindrical) มีแขนเกาะกับแกนกลาง ซึ่งเป็นหลัก แขนนั้นสามารถเคลื่อนที่ขึ้นลงหมุนรอบแกน และสามารถบิดและหดได้
โครงสร้างทรงกระบอก ซึ่งสามารถหมุนแขนได้รอบตัว แขนสามารถยืดและหดได้ตามแนวแกนเสาที่รองรับ แขนสามารถขึ้นลงได้ตามระดับความต้องการ
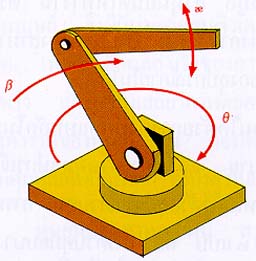
ค. โครงสร้างเชิงขั้ว (polar) มีลำตัวที่บิดได้ มีแขนที่หมุนและยืดหดได้
โครงสร้างเชิงขั้ว มีลำตัวที่บิดได้ มีแขนที่หมุนและยึดหดได้
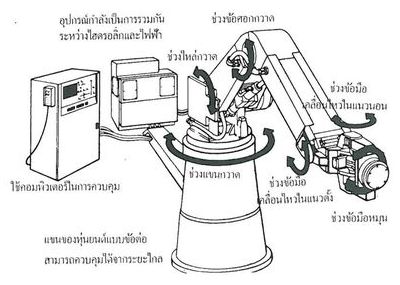
ง. โครงสร้างมนุษย์ (antropomorphic) เป็นโครงสร้างที่เลียนแบบโครงสร้างของมนุษย์ ในหุ่นยนต์อุตสาหกรรม มีลักษณะเป็นส่วนบนของลำตัวมนุษย์ ประกอบด้วยหัวไหล่ แขนท่อนบน แขนท่อนล่าง ข้อมือและมือ
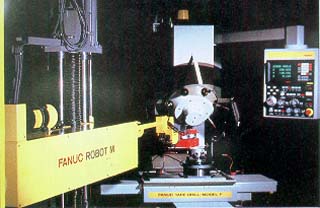
โครงสร้างมนุษย์ และลักษณะการเคลื่อนที่ด้วยระบบไฮดรอลิก และระบบเซอร์โวมอเตอร์กระแสตรง
อุปกรณ์ให้กำลังขับเคลื่อนของหุ่นยนต์
ในปัจจุบันมีอุปกรณ์ให้กำลังขับเคลื่อนหุ่นยนต์อยู่ ๓ ชนิด คือ มอเตอร์กระแสไฟตรง นิวแมทิก และไฮดรอลิก
ก. มอเตอร์กระแสไฟตรง คือ อุปกรณ์ขับเคลื่อนหมุนรอบตัวเองได้ ด้วยพลังงานจากระแสไฟตรง เป็นอุปกรณ์ที่ใช้ได้สะดวก ง่ายต่อการควบคุม และตำแหน่งแม่นยำ ปัญหาสำคัญคือ มีกำลังจำกัด และมีปัญหาในการนำหุ่นยนต์ที่ขับเคลื่อนด้วยไฟฟ้าไปใช้ในบริเวณที่มีวัตถุไวไฟ เช่น งานพ่นสี เป็นต้น
ข. นิวแมติก เป็นระบบที่ขับเคลื่อนทางตรง ทางโค้งหรือหมุนได้ ด้วยแรงอัดของลม เป็นอุปกรณ์ที่ราคาถูก และยุ่งยากน้อยที่สุด ปัญหาที่สำคัญอยู่ที่การควบคุมความเร็ว และตำแหน่ง
ค. ไฮดรอลิก เป็นระบบที่ขับเคลื่อนด้วยแรงอัดของน้ำมัน เป็นอุปกรณ์ที่ราคาแพง ให้กำลังสูง มีอุปกรณ์อยู่หลายแบบ สามารถเลือกใช้เหมาะสมกับงานได้ เช่น การเคลื่อนที่เป็นเส้นตรง หรือแบบหมุน เป็นต้น ระบบการควบคุมมักใช้ไฟฟ้า แต่เนื่องจากใช้อุปกรณ์ไฟฟ้าน้อย และใช้กำลังไฟฟ้าต่ำมาก จึงสามารถใช้หุ่นยนต์ที่ขับเคลื่อนด้วยระบบไฮดรอลิกกับบริเวณที่วัตถุไวไฟได้
ใน พ.ศ. ๒๕๒๘ มีแนวโน้มที่จะนำมอเตอร์กระแสไฟตรง มาใช้เป็นอุปกรณ์ขับเคลื่อนหุ่นยนต์อุตสาหกรรมมากขึ้น เนื่องจากได้มีการพัฒนามอเตอร์กระแสไฟตรง ให้ใช้กับหุ่นยนต์อุตสาหกรรมได้ดีขึ้นในด้านความเร็ว ความแม่นยำของการหยุด และการยกน้ำหนัก
มือหุ่นยนต์
มือหุ่นยนต์จะยึดติดกับส่วนของหุ่นยนต์ที่เป็นข้อมือ (wrist) ซึ่งสามารถหมุนได้อย่างอิสระ ๓ แนวแกน คือ แกนบิดในระนาบที่ตั้งฉากกับปลายแขน แกนเงยขึ้นลงจะหมุนในระนาบที่ตั้งฉากกับพื้น และแกนส่ายจะหมุนในระนาบที่ขนานกับแกน อย่างไรตามลักษณะการใช้งาน ส่วนใหญ่จะทำงานเพียง ๒ ทิศทางเท่านั้น เช่น หุ่นยนต์ที่ใช้ในงานเชื่อม ในลักษณะที่สมมาตร จะให้ความอิสระของข้อมือเพียง ๒ แกนเท่านั้น อย่างไรก็ตาม ในกรณีงานที่ค่อนข้างยุ่งยาก อาจใช้ถึง ๓ แกนข้อสำคัญของข้อมือ โดยจะต้องสร้างให้มีความมั่นคง และมีน้ำหนักน้อยที่สุด
ระบบควบคุมหุ่นยนต์อุตสาหกรรม
ระบบควบคุมเป็นส่วนที่สำคัญที่สุดของหุ่นยนต์ ทำหน้าที่เป็นสมองเก็บข้อมูล สั่งหุ่นยนต์ให้ทำงาน ตรวจสอบ และควบคุมตำแหน่งการทำงาน ในบางเครื่องสามารถตรวจสอบความผิดปกติของอุปกรณ์ภายในได้
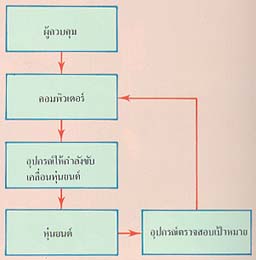
หุ่นยนต์จะทำงานได้ด้วยการควบคุมแบบอัตโนมัติ โดยมีการกำหนดเป้าหมาย และมีการควบคุมอุปกรณ์ให้ทำงานตามเป้าหมาย ที่กำหนดไว้ ด้วยอุปกรณ์ควบคุม การทำงานของอุปกรณ์ควบคุมมี ๒ แบบ คือ การควบคุมแบบวงจรปิด และการควบคุมแบบวงจรเปิด สำหรับการควบคุมแบบวงจรปิดนั้น อุปกรณ์ควบคุมจะคอยตรวจสอบเปรียบเทียบกับเป้าหมาย และควบคุมให้ได้ผลที่ถูกต้องตลอดเวลา หุ่นยนต์แบบนี้ จึงจำเป็นต้องมีอุปกรณ์ตรวจสอบเป้าหมายด้วย แต่ในการควบคุมแบบวงจรเปิด อุปกรณ์ควบคุมจะดำเนินการ โดยมิได้ตรวจสอบเป้าหมาย เช่น ถ้านาย ก เคยเดินได้ ก้าวละ ๕๐ เซนติเมตร เมื่อได้รับคำสั่งให้เดินเป็นระยะทาง ๕ เมตร นาย ก ก็จะเดินไป ๑๐ ก้าว อย่างนี้เรียกว่า นาย ก เดิน โดยใช้การควบคุมแบบวงจรเปิด ซึ่งอาจเกิดความผิดพลาดขึ้นได้ แต่ถ้านาย ก ใช้ไม้เมตรวัดระยะทางที่เดินไป ๑๐ ก้าวนั้นด้วยว่า ได้ ๕ เมตร ถูกต้องหรือไม่ ถ้าไม่ถูกต้อง นาย ก จะเดินหน้า หรือถอยหลังให้ได้ระยะทาง ๕ เมตร พอดี อย่างนี้เรียกว่า นาย ก เดิน โดยใช้การควบคุมแบบวงจรปิด จะเห็นได้ว่า หุ่นยนต์ที่มีการควบคุมแบบวงจรปิดจะสร้างได้ยากกว่า แต่ให้ผลที่แน่นอน
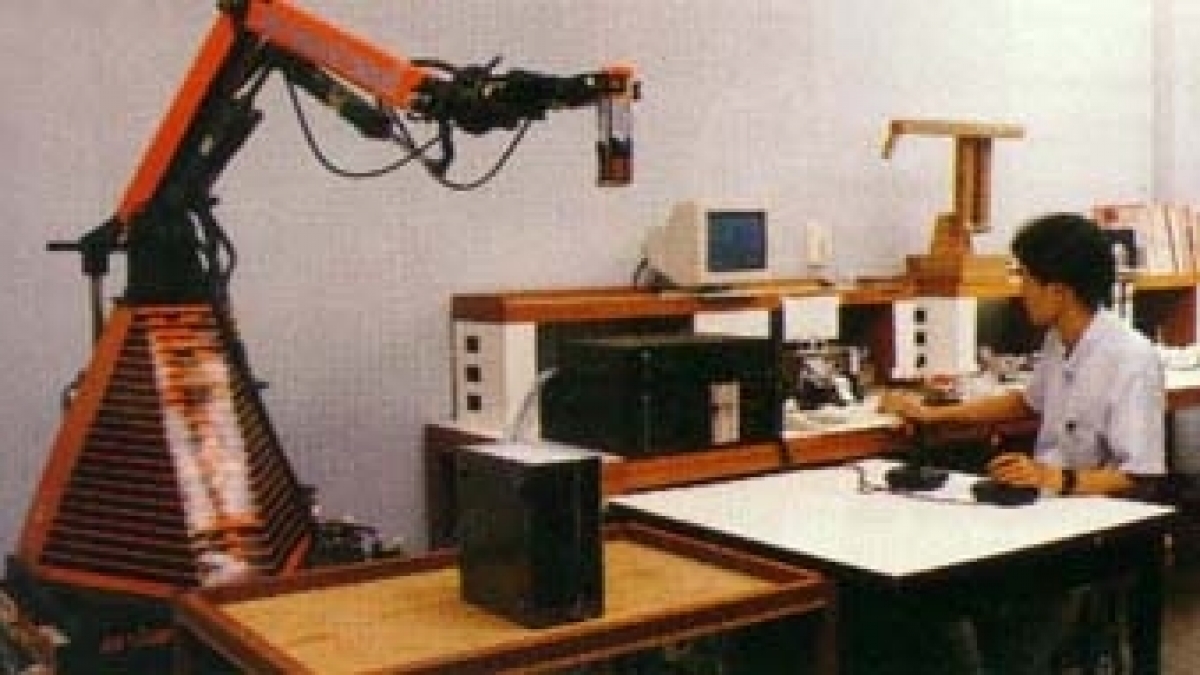
แผงควบคุมหุ่นยนต์ด้วยระบบคอมพิวเตอร์
ถ้าเราลองมองไปรอบๆ ตัว ก็จะพบว่า ทุกสิ่งทุกอย่างก็ตกอยู่ในสภาวะของการควบคุม และถูกควบคุมทั้งสิ้น แม้แต่สภาวะของธรรมชาติ ต่างก็พยายามควบคุมกันเอง เพื่อให้พบกับจุดสมดุลตลอดเวลา นับแต่สิ่งที่ใกล้ตัวที่สุดคือ การทำงานของร่างกาย จนกระทั่งการทำงานของหุ่นยนต์ ต่างก็ต้องอาศัยอุปกรณ์ควบคุมทั้งสิ้น ในการควบคุม จำเป็นต้องทราบตัวแปรต่างๆ ที่มาเกี่ยวข้องอยู่ตลอดเวลา เช่น เมื่อต้องการการรองน้ำให้ได้ครึ่งถังพอดี ขั้นแรก จะต้องนำถังน้ำไปเตรียมไว้ที่ก๊อก ขั้นต่อไปคือ การเปิดปิดลิ้น (valve) เพื่อให้น้ำไหลลงถัง ในขณะเดียวกัน เราจะต้องใช้สายตาตรวจวัดระดับน้ำ หากประมาณเกือบได้ตามเป้าหมาย เราจึงเริ่มปรับลิ้นก๊อก เพื่อให้ปริมาณการไหลลดลง และปิดก๊อก จนกระทั่งหยุดไหล เมื่อระดับน้ำถึงครึ่งพอดี คราวนี้ลองใหม่ ถ้าบังเอิญเผลอปล่อยให้น้ำไหลจนเกินครึ่งถัง สิ่งที่ต้องกระทำคือ การเทน้ำส่วนที่เกินออกจนได้ระดับตามกำหนด
วิธีการข้างต้นนี้ คือ การควบคุมอัตโนมัติแบบวงจรปิดอย่างสมบูรณ์ ตัวแปรของกระบวนการคือ อัตราการไหล ระดับน้ำ และสถานะของลิ้น ระดับน้ำจะแปรผันไปตามการปิดเปิดลิ้น อุปกรณ์ที่ทำให้เกิดกระบวนการคือ มือ ส่วนอุปกรณ์ที่ใช้ตรวจสอบตัวแปร และส่งสัญญาณกลับคือ ตา ศูนย์กลางหรือหัวใจของการควบคุม ให้กระบวนการเป็นไปตามขั้นตอน และดำเนินไปสู่เป้าหมายตลอดจนการตัดสินใจก็คือ สมอง

สิ่งที่ได้กล่าวมาเป็นการควบคุมที่กระทำขณะตัวแปรเกิดการเปลี่ยนแปลงไม่เร็วนัก ในกระบวนการที่ดำเนินไปอย่างช้าๆ จะสามารถควบคุมด้วยมือหรือเครื่องมือพื้นฐานได้ แต่สำหรับกระบวนการที่มีการเปลี่ยนแปลงอย่างรวดเร็ว และต้องการเป้าหมาย ที่มีความถูกต้องแม่นยำ เราจะไม่สามารถควบคุมด้วยมือได้ เพื่อหลีกเลี่ยงความล่าช้า และไม่สม่ำเสมอของมนุษย์ จึงมีผู้นำเอาคอมพิวเตอร์มาประยุกต์เข้ากับหุ่นยนต์ เพื่อให้เกิดผลสำเร็จของการควบคุมอย่างเที่ยงตรง รวดเร็ว และอยู่ในเสถียรภาพตลอดเวลา ในการควบคุมการทำงานของหุ่นยนต์นั้น คอมพิวเตอร์หนึ่งเครื่องอาจจะควบคุมหุ่นยนต์ได้มากกว่าหนึ่งตัว ในเวลาเดียวกัน

หุ่นยนต์ขนส่ง ทำหน้าที่ขนส่งชิ้นงาน มาให้กับหุ่นยนต์อุตสาหกรรม หรือเครื่องจักรกลอัตโนมัติ ในระบบผลิตอัตโนมัติสมัยใหม่
หุ่นยนต์อุตสาหกรรมนี้ สามารถช่วยลดต้นทุนการผลิตของผลิตภัณฑ์อุตสาหกรรม และสามารถทำงานแทนมนุษย์ได้มากขึ้นเป็นลำดับ ดังนั้นลักษณะของงานที่มนุษย์ทำในโรงงานอุตสาหกรรมจะค่อยๆ เปลี่ยนไป กล่าวคือ มนุษย์จะมีหน้าที่ควบคุมการทำงาน และดูแลซ่อมแซมหุ่นยนต์มากกว่าจะลงมือผลิตเอง ส่วนผลในระยะยาว น่าจะนำไปสู่สังคมที่มนุษย์ใช้เวลาทำงานน้อยกว่าปัจจุบัน และมีเวลาทำกิจกรรมอื่นๆ เช่น เล่นกีฬา ฟังหรือเล่นดนตรี อ่านหนังสือ ฯลฯ มากขึ้น
เนื่องจากหุ่นยนต์อาจจะนำไปสู่ระบบการผลิตที่มีประสิทธิภาพยิ่งขึ้น สังคมจึงควรจะมีกำลังทางการเงินมากขึ้น และสามารถปรับปรุงสิ่งแวดล้อม เช่น ดิน พืช น้ำ และอากาศ ให้มีคุณภาพดีกว่าปัจจุบันได้มาก